


Tutorial on Creating Environments¶
In this tutorial, we will go through the process of creating a new environment.
Boilerplate Code¶
def __init__(self, size=10, **kwargs):
# Size of environment
self.size = size
super().__init__(self, **kwargs)
# Allow only the movement actions
self.action_space = spaces.Discrete(self.actions.move_forward + 1)
First, we need to create a class the inherits from MiniWorldEnv, we call our class SimpleEnv. Then, we define the action space to be only consisting of turn left (0), turn right (1), move forward (2), and move backward (3).
Generate the walls¶
To generate the walls, we override the function _gen_world.
def _gen_world(self):
self.add_rect_room(min_x=0, max_x=self.size, min_z=0, max_z=self.size)
self.place_agent()
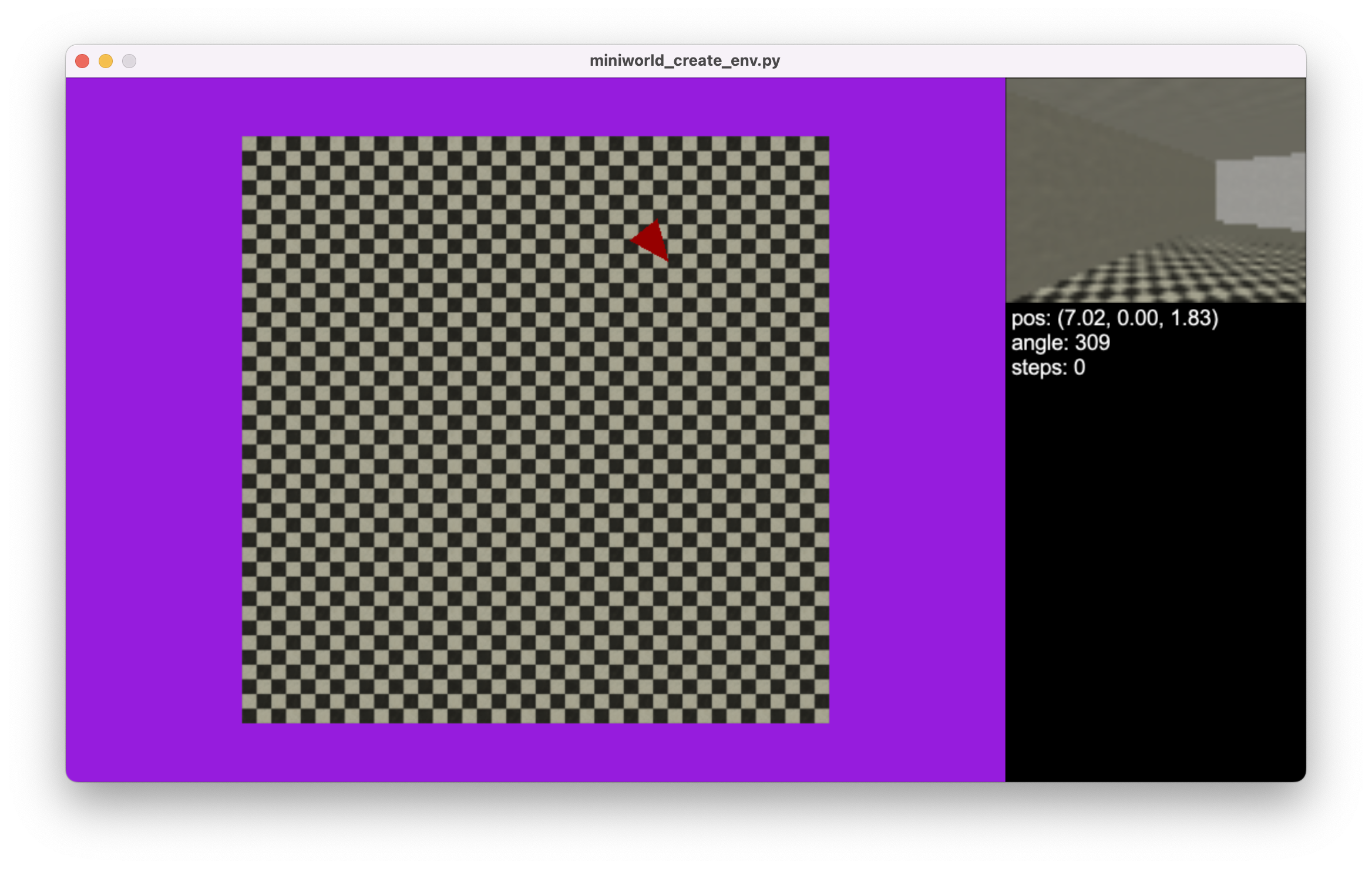
The function _gen_world takes the arguments: min_x, max_x, min_z, max_z. Note that instead of using the X-Y plane, we use the X-Z plane for movement. After doing this, the environment should look like this:
Place Goal¶
To place a goal in the environment, we use the function
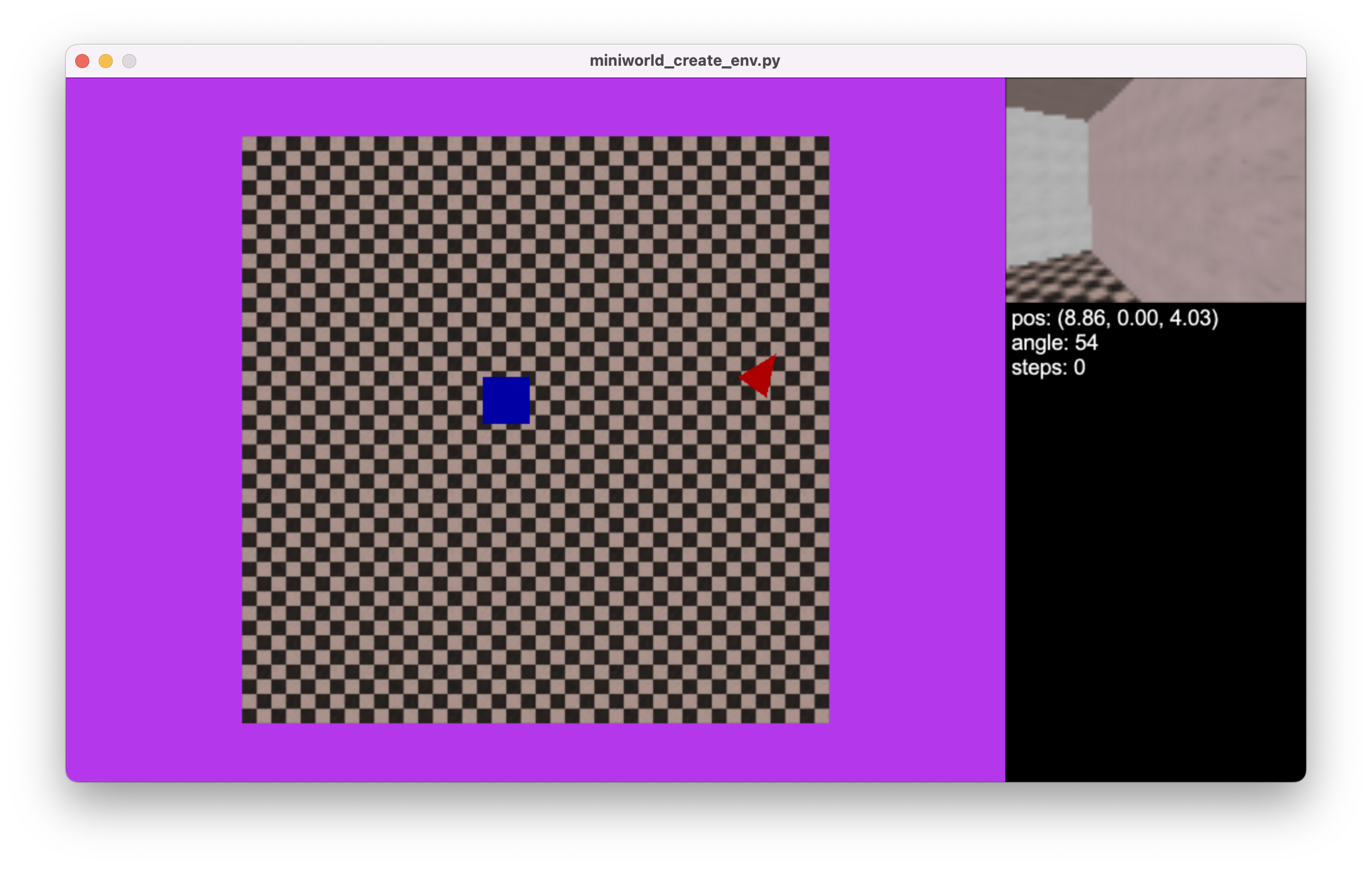
self.box = self.place_entity(Box(color=COLOR_NAMES[0]), pos=np.array([4.5, 0.5, 4.5]), dir=0.0)
which places the goal in the middle. Now the environment should look like this:
Add reward¶
To add a reward when the agent gets close to the box, we can do the following:
def step(self, action):
obs, reward, termination, truncation, info = super().step(action)
if self.near(self.box):
reward += self._reward()
termination = True
return obs, reward, termination, truncation, info