


WallGap¶
Action Space |
|
Observation Space |
|
Creation |
|
Description¶
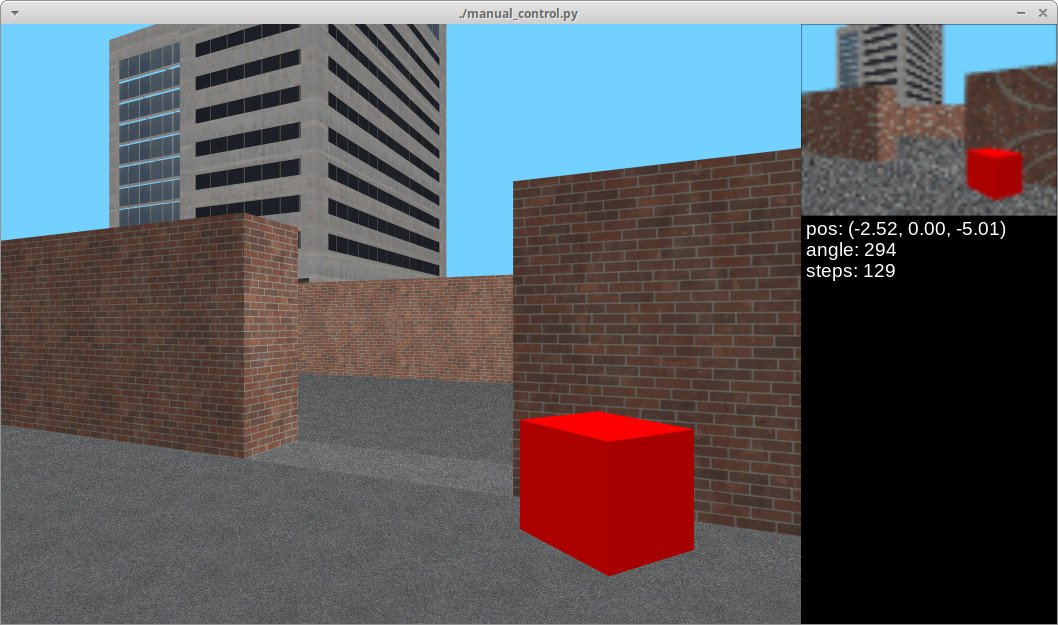
Outside environment with two rooms connected by a gap in a wall. The goal is to go to a red box within as little steps as possible.
Action Space¶
Num |
Action |
|---|---|
0 |
turn left |
1 |
turn right |
2 |
move forward |
Observation Space¶
The observation space is an ndarray with shape (obs_height, obs_width, 3)
representing an RGB image of what the agents see.
Rewards¶
+(1 - 0.2 * (step_count / max_episode_steps)) when box reached
Arguments¶
env = gymnasium.make("MiniWorld-WallGap-v0")